作品
2010年 生徒作品

愛着を生む変形の研究
2010年度卒業研究 大熊健太郎
A Study and Design of Product Based on Context of Use
本研究では「変形する」という現象に着目し、人がより興味を抱き愛着を感じる変形とは何かについて探ることを目的とした。 「有生性」(生命の印象)を強く感じることができる変形が愛着を生む1つの要因と考え、皮膜を持った変形「Metamorphosis」を制作し、提案を行った。
文化及び人間工学的調査からの運搬道具のデザイン研究
2010年度卒業研究 藤山遼太郎
Study of Design on Carrying Tool from Cultural and Ergonomic Research
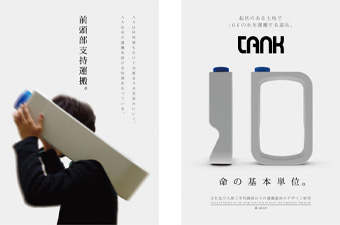
「DESIGN FOR THE OTHER 90%」の考え方に共感し、「水を運ぶ」をテーマとした研究である。 文化と人間工学の調査から、前頭部支持運搬を採用し、起伏のある土地で、命の基本単位である10ℓの水を運搬するタンクを提案した。
閉鎖性水域における汚染を解決する水中移動型エージェントの提案
2010年度卒業研究 平林宗二郎
A Study of Figuration and Behavior of Robot Focused on Interaction with Human
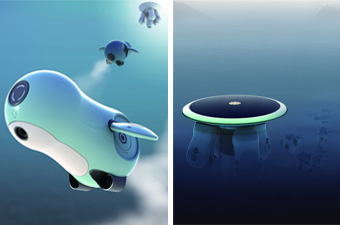
閉鎖性水域における汚染を解決する水中移動型エージェントのデザイン提案を示す。複数の専門家に、工学とデザイン両視点からのアドバイスをいただき、それらを参考に新規性あるデザインを目指した。2010年11月に、提案プロダクトの前身ともいえるロボットが開発されており、 十数年 後の実現性は非常に高いと予想できる。

災害避難所における被災者の健康維持に関するデザイン提案
2010年度卒業研究 松隈 祐紀
Design Proposal of Products about Victim's Health Maintenance in Evacuation
知的機能工学分野での卒業研究です。
被災者の健康に対する意識を高めることを目的とし、ハブラシ型の簡易検査キットを提案しました。 災害避難所は、設備の不足などから衛生的な状態を保つのが難しく、感染症の流行など様々な健康問題が起こります。 無理のない方法でチェックを行うことで健康に対して気を付けるきっかけを作ります。

行為分析からの消毒器のデザイン提案
2010年度修士研究 黒岩麻紀
ユーザーの機器の使い方や問題点を抽出する為に、質的サーブリック分析や暗黙知の獲得を行いデザインの方法を構築した。この方法を基に大気圧ダメージフリープラズマ滅菌器の商品開発を行い、検証方法を提案した。
2009年 生徒作品

人のインタラクションに主眼を置いたロボットの造形ならびに動作に関する研究
2009年度卒業研究 西村英伍
A Study of Figuration and Behavior of Robot Focused on Interaction with Human
研究では、ダイエットや習い事などといった地道で継続的な行為について「はじめるきっかけや続ける励みを与えてくれる存在」としてのロボットの可 能性を探るべく、特に「ウォーキングに連れて行くロボット」の、肩に乗せることができる形状と、ウォーキングに連れて行きたくなるようなインタラクションを想定して機能設計を 行い、可動モデルを制作した。
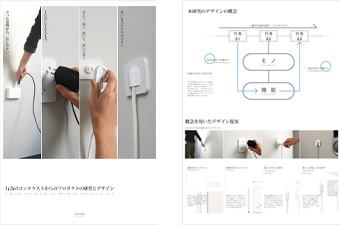
行為のコンテクストからのプロダクトの研究とデザイン
2009年度卒業研究 西村英伍
A Study of Figuration and Behavior of Robot Focused on Interaction with Human
研究では、ダイエットや習い事などといった地道で継続的な行為について「はじめるきっかけや続ける励みを与えてくれる存在」としてのロボットの可 能性を探るべく、特に「ウォーキングに連れて行くロボット」の、肩に乗せることができる形状と、ウォーキングに連れて行きたくなるようなインタラクションを想定して機能設計を 行い、可動モデルを制作した.
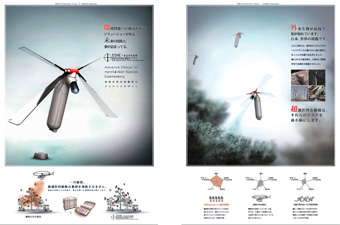
有害外来生物駆除のアドバンスデザイン
2009年度卒業研究 田上雅彦
Advance Design of Harmful Alien Specie Exterminating
小型の天敵ロボットANd(Artificial Natural Enemy Device)複数 機を用いた超選択的な薬剤噴射により,有害生物を一個体単位で駆除するシステムである.このシステムを用いることにより, 現在存在する多くのの副作用に関するリスクを最 小限にすることができる. このシステムの実現のためには,2010 年現在研究中の技術や,10 年~20 年のうち に実現可能となる未来の技術が必要となり,この研究ではそれらを予測し,約20年後に可能なスペックを 予測した上,提案を行った.
